What Is The Work-Energy Theorem?
The Work-Energy Theorem is a fundamental principle in classical mechanics that connects the concepts of work and kinetic energy. It provides a powerful tool for analysing the motion of objects without relying solely on Newton’s laws in their force-acceleration form.
The principle of work and kinetic energy (also known as the work-energy theorem) states that the work done by the sum of all forces acting on a body equals the change in the kinetic energy of the particle.
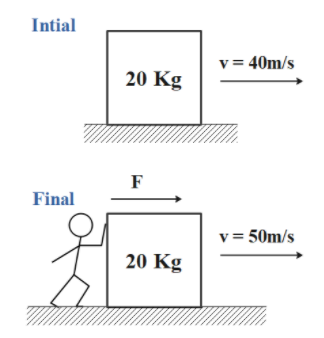
The work done, W, by the net force on a body equals the change in the particle’s kinetic energy KE:
W = ∆KE = ½ mvf2 – ½ mvi2
where vi and vf are the speeds of the particle before (initial) and after (final) the application of force, and m is the mass of the body.
Furthermore, the work done can also be stated as:
W = Fd
for a force, F moving a body through a distance d.
Example 1

Consider a motor car travelling at 30mph which then crashes into a stationary object such as a tree! What force is exerted on the car during this collision assuming that the vehicle compresses by 300 mm upon impact.
A typical mass of a car is around 1500kg.
1 mile = 1609 metres
Velocity = 30mph = (30×1609) metres per hour = (30×1609)/3600 m/s = 13.4m/s
Initial kinetic energy of the car travelling at 30mph:
½ mvf2 – ½ mvi2
KEi = ½ mvi2 = ½ (1500)(13.4)2
KEi = 134.8kJ
Final kinetic energy of the car is zero because it will have zero velocity.
KEf = 0
The change in kinetic energy can be found:
∆KE = 134.8 – 0 = 134.8kJ
By the work-energy principle, the work done and the energy are related by:
W = ∆KE
Hence
W = 134.8kJ
However, recall the work done is also defined as:
W = Fd
where F is the force and d is the distance moved, which we have assumed to be the crumple zone of the car and is taken as 300 mm in this example. Therefore:
Fd = 134800
F(0.3) = 134800
F = 134800 / 0.3
F = 450000 = 450kN
The above definition can be extended to rigid bodies by considering the work of the torque and rotational kinetic energy:
W = ∆KE linear + ∆KE rotational
The rotational kinetic energy of a body in angular motion, is analogous to the linear equivalent:
Now, we turn attention to the distance, x. From above, we know that:
Linear KE = ½ mv2 and Rotational KE = ½ Iω2
where m is the mass (kg) and v is the velocity (m/s), I is the moment of inertia (kgm2) and ω is the angular velocity (rad/s). Energy has SI units of Joules (J).
A body can of course also have gravitational potential energy. This is the work that has been done in raising the body to a height h above some given datum or ground level. i.e.

PE = mgh
We can now combine all of the above in to an equation for work done:
W = ∆KE linear + ∆KE rotational + ∆PE
The principle of conservation of energy is particularly useful when solving problems involving a combination of linear and angular motion.
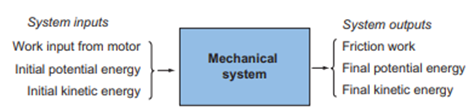
A typical example is a hoist, where a load is raised by a cable on a winding drum. The driving motor must supply a torque that is sufficient to overcome the inertia of both the winding drum and the load, the weight of the load and also frictional resistance.
As x = 0 when t = 0, we can substitute this into the above equation to give:
Such a mechanical system can be represented as a ‘system’ as follows:
Where
and diagrammatically as:

An alternative way of expressing the work-energy principle is:
Total work and energy input = Total work and energy output
Work input + Initial PE + Initial KE = Final PE + Final KE + Friction work
Wi + mgh1 + ½ mv12 + ½ Iω12 = mgh2 + ½ mv22 + ½ Iω22 + Wf
This can be rearranged to give an equation for the input work:
Wi = – mgh1 – ½ mv12 – ½ Iω12 + mgh2 + ½ mv22 + ½ Iω22 + Wf
Wi = mg (h2-h1) + ½ m (v22 – v12) + ½I( ω22-ω12) + Wf
If the frictional resistance force Ff is known, the work done in overcoming friction can be calculated using the formula below, where s is the linear distance travelled.
Wf = Ffs
If the friction torque Tf in the bearings of a system is known, the work done in overcoming friction can be calculated using the formula below where θ is the angle turned (radians):
Wf = Tfθ
Example 2
A hoist raises a load of 75 kg from rest to a speed of 2.5 m/s whilst travelling through a distance of 6 m. The load is attached to a light cable wrapped around a winding drum of diameter 500 mm. The mass of the drum is 60 kg and its radius of gyration is 180 mm. The bearing friction torque is 5 Nm.

Determine
(a) the angle turned by the drum
(b) the final angular velocity of the drum
(c) the work input from the driving motor
(d) input torque to the winding drum
(e) the maximum power developed by the motor.
Solution:
a) The load traverses 6 m in a linear direction. This is connected to the drum and so we must relate the linear distance of 6m to the associated angular distance on the drum.
The drum has a diameter, d, of 500 mm = 0.5 m.
The arc length, S, of a circle is defined as a section of the circle’s circumference and it is related to the angle and radius of a circle as follows:
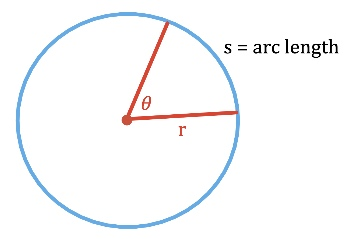
Hence:
θ = s / r
In our case, the arc length will be the length of the rope that wraps around the drum which we are told is 6 m. The radius, r, is half of the drum diameter. Therefore
θ = 6 / 0.25
θ = 24 radians
(b)The final angular velocity
ω2 = v2 / r
ω2 = 2.5 / 0.25 = 10 rad/s
c) To find the work input we must first find the moment of inertia of the drum:
I = mk2
I = (60)(0.18)2
I = 1.94 kgm2
and the work done in overcoming friction:
Wf = Tf θ
Wf = (5)(24) = 120J
Finally, the input work can be calculated given that the initial linear and angular velocities are zero (starts from rest) and the initial height can be taken as zero also:
Wi = mg (h2-h1) + ½ m (v22 – v12) + ½I( ω22-ω12) + Wf
Wi = (75)(9.81)( 6-0) + ½ (75)(2.52 – 02) + ½ (1.94)(102 -02) + 120
Wi = 4414.5 + 234.375 + 97 + 120Wi = 4866.9J
(d)The input torque required to operate the drum can now be easily found:
W = Tθ
Ti = Wi / θ
Ti = 4866.8 / 24
Ti = 202.8 Nm
(e)Finally, the power developed by the motor must be:
P = Tω
Pi = (202.8)(10)
Pi = 2028W or 2.03kW
Interested in our engineering courses?
We have over 70 courses across all major engineering disciplines, including, mechanical, electrical and electronic, civil, aerospace, industrial, computer and general engineering. Visit our course catalogue for a complete list of fully accredited engineering programmes.
A small selection of short courses …
Diploma in Mechanical Engineering
Diploma in Structural Engineering
Level 6 Courses
International Graduate Diploma in Mechanical Engineering
International Graduate Diploma in Civil Engineering
International Graduate Diploma in Aerospace Engineering
Level 5 Courses
Higher International Diploma in Mechanical Engineering
Higher International Diploma in Civil Engineering
Higher International Diploma in Aerospace Engineering
Level 4 Courses
Higher International Certificate in Mechanical Engineering
Higher International Certificate in Civil Engineering
Higher International Certificate in Aerospace Engineering
Alternatively, you can view all our online engineering courses here.
<
Recent Posts
Civil Engineering Courses and Diplomas: Topics, Skills and Career Routes
Civil Engineering Courses and Diplomas: Topics, Skills and Career Routes Introduction Civil engineering is the backbone of modern society. From roads and bridges to skyscrapers and water systems, civil engineers design, build, and maintain the infrastructure that keeps the world running. If you’re considering a civil engineering course or diploma, understanding what it covers is […]
What Is a Diploma in Engineering? Courses, Levels and Career Routes Explained
What Is a Diploma in Engineering? Courses, Levels and Career Routes Explained Introduction Engineering shapes the world around us, from the buildings we live in to the technology we use every day. But for many aspiring engineers, the biggest question is not whether to pursue engineering, but how to start. Traditional university degrees are not […]
Engineering Courses: How to Choose the Right Route for Your Career
Engineering Courses: How to Choose the Right Route for Your Career Introduction Choosing an engineering course can feel like standing at the beginning of several different roads, each leading towards a different kind of future. One route may lead into mechanical systems and manufacturing. Another may lead towards aircraft, infrastructure, electronics, computing, renewable energy or […]