Interface requirements and their internal structure
In our previous article we looked at PLC systems and what they are. Now we’re going to look at the interface requirements we would see in a PLC system and look at their internal structure.
To connect input/output modules to the processor in a PLC, we can use a variety of interfaces. In this article we’re going to focus on the more common ones.
RS-232 interface

The RS-232 interface is used for the organisation of data transfer between a transmitter and a receiver. For example, this could be between Data Terminal Equipment (DTE) and Data Communications Equipment (DCE).
The speed of the RS-232 will depend on the distance between the devices. If we had a distance of 15 m, the speed would be 9600 bps. At a very short distance, the speed can be around 115 kbps, although we can get hardware that supports speeds of up to around 921 kbps.
The RS-232 interface operates in full-duplex mode. This means we can send and receive information at the same time, as different lines are used for receiving and transmitting.
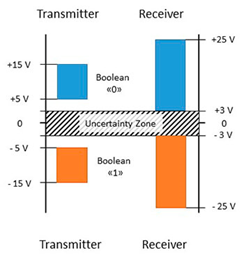
Information on the RS-232 interface is transmitted digitally by logical 0 and 1:
- The logical “1” (MARK) corresponds to a voltage in the range from -3 to -15 V.
- The logical “0” (SPACE) corresponds to a voltage in the range from +3 to +15 V.
In addition to the two receive and transmit lines, special lines for hardware flow control and other functions are available on the RS-232. For connection to RS-232, a special D-sub connector is used, usually a 9-pin DB9, and a 25-pin DB25 is used less often.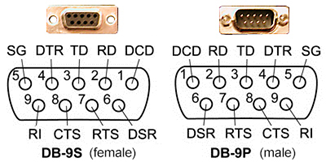
DB connectors are divided into:
- Male – “daddy” (plug, pin)
- Female – “mother” (socket, socket).
RS-422 interface
The RS-422 interface is similar to RS-232. This allows us to simultaneously send and receive information on separate lines (full-duplex), but uses a different signal for it.

The data transfer speed in RS-422 depends on the distance and can vary from 10 kbps (1200 m) to 10 Mbps (10 m).
In the RS-422 network, there can only be one transmitting device and up to 10 receiving devices. The line has 4 wires for data transmission (2 twisted wires for transmission and 2 twisted wires for receiving) and one common GND ground wire. Twisting wires (twisted pair) with each other allows us to get rid of interference. The voltage on the data lines can be in the range from -6 V to +6 V.
RS-485 interface

In industry, the most common interface is RS-485 (EIA-485). It uses a multi-point topology, which allows us to connect several receivers and transmitters. The RS-485 interface is similar to the RS-422 in that it also uses a differential signal for data transmission.
There are two types of RS-485:
- RS-485 with 2 contacts, operates in half duplex mode
- RS-485 with 4 contacts, operates in full duplex mode
In full duplex mode, we can simultaneously receive and transmit data, and in half-duplex mode, we can either transmit or receive.
In most RS-485 systems, twisted-pair cables and balanced differential signalling are used to reduce the influence of external noise on the network signalling. RS-485 is, by nature of its balanced circuits and twisted-pair media, relatively immune to common-mode noise.
In one segment of the RS-485 network, there can be up to 32 devices, but with the help of additional repeaters and signal amplifiers up to 256 devices. At one time, only one transmitter can be active.
The speed of operation also depends on the length of the line and can reach 10 Mbit / s at 10 m. The voltage on the lines is in the range from -7 V to +12 V.
Ethernet
Ethernet is a way of connecting computers and other network devices in a physical space. It’s often referred to as a local area network or LAN. The idea of an Ethernet network is that computers and other devices can share files, information and data between each other efficiently.
Ethernet cables are a type of network cable. They are designed to work with Ethernet ports, which can be found on routers, computers, TVs and most internet- and network-enabled devices. Hardwiring devices has its benefits, including faster internet and more reliable connectivity. It’s usually recommended to wire devices that do not move and use WiFi for mobile devices.
Keep an eye out for our next articles, where we’re going to dive even further into Programmable Logic Controller systems and their uses.
Interested in our courses?
You can read more about our selection of accredited online electrical and electronic engineering courses here.
Check out individual courses pages below:
Diploma in Electrical and Electronic Engineering
Higher International Certificate in Electrical and Electronic Engineering
Diploma in Electrical Technology
Diploma in Renewable Energy (Electrical)
Higher International Diploma in Electrical and Electronic Engineering
Alternatively, you can view all our online engineering courses here.
Recent Posts
Civil Engineering Courses and Diplomas: Topics, Skills and Career Routes
Civil Engineering Courses and Diplomas: Topics, Skills and Career Routes Introduction Civil engineering is the backbone of modern society. From roads and bridges to skyscrapers and water systems, civil engineers design, build, and maintain the infrastructure that keeps the world running. If you’re considering a civil engineering course or diploma, understanding what it covers is […]
What Is a Diploma in Engineering? Courses, Levels and Career Routes Explained
What Is a Diploma in Engineering? Courses, Levels and Career Routes Explained Introduction Engineering shapes the world around us, from the buildings we live in to the technology we use every day. But for many aspiring engineers, the biggest question is not whether to pursue engineering, but how to start. Traditional university degrees are not […]
Engineering Courses: How to Choose the Right Route for Your Career
Engineering Courses: How to Choose the Right Route for Your Career Introduction Choosing an engineering course can feel like standing at the beginning of several different roads, each leading towards a different kind of future. One route may lead into mechanical systems and manufacturing. Another may lead towards aircraft, infrastructure, electronics, computing, renewable energy or […]