Why Wings Flex: Understanding the Challenges of Aeroelasticity
Introduction
In this blog we will provide some insight into aeroelasticity and some of the issues it can cause with respect to stability and control of aircraft.

Aeroelasticity is the branch of mechanics that is concerned with the interaction of fluids and solid flexible bodies. In our case this is the interaction of the airframe, or control surfaces, with air and the resulting forces. Aeroelastic interactions play a key part in defining aircraft performance in 4 key areas:
- Wing and tail lift redistribution – changing initial calculated loading
- Lift effectives is altered causing issues with stability, responsiveness and trim
- Control surface effectiveness is altered
- The dynamic response to flutter, turbulence and buffeting is affected
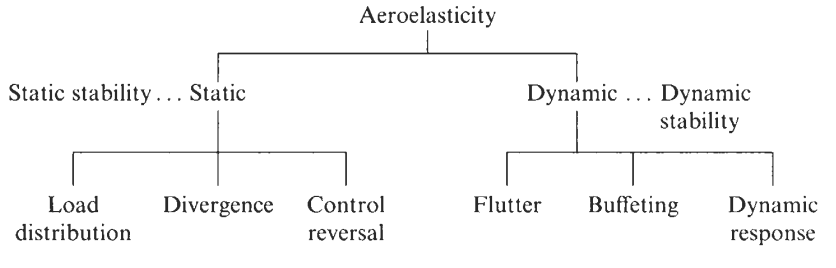
This section will look at a few individual case studies and analyse the cause and effect of aeroelasticity issues and provide a design solution. It is beneficial to use the image below which separates static and dynamic aeroelastic effects.
The following sections will examine a case of static aeroelasticity and dynamic aeroelasticity respectively.
Even from the early days of powered flight aeroelasticity has been an issue. Aircraft speeds were relatively low in the first decade of powered flight so that the interaction of the airflow that caused wing and tail twisting, had relatively little effect on the stability of the aircraft. The stiffness of the airframes were reasonably large so the consequences of the airframe deformation due to aeroelastic effects was minimal. As engine power and airspeed increased, low torsional stiffness created aeroelastic problems that led to wing failures at high speeds.
Wing Divergence
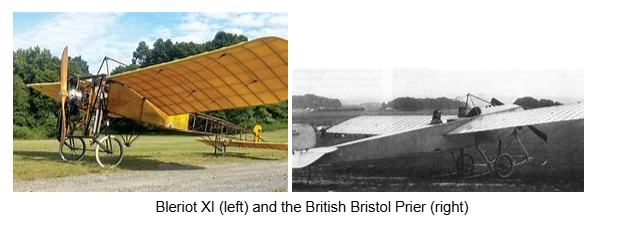
The Bleriot XI and British Bristol Prier As shown below were early aircraft that were involved in fatal accidents. Initial structural failures were mistakenly thought to be due to insufficient strength in the main wing spar. Even after increasing the spar sizing the failures still occurred. These failures could be attributed to the aeroelastic effect wing torsional divergence. Not much was known about this phenomenon and so the cause of the failure was not realised until much later.
Wing torsional divergence
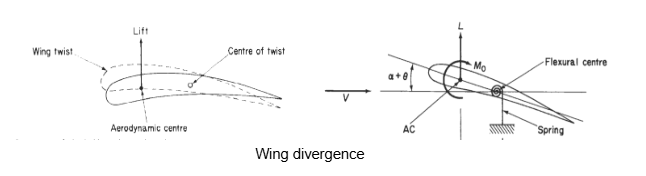
Consider a wing at incidence shown below. If we consider the pressure distribution on the wing they will be causing forces that have the effect of twisting the wing in a nose up sense. Because the structure is not perfectly rigid, it does in fact twist, and its shape becomes distorted relative to the wing root section. It twists about an axis known as the torsional axis of the wing, which is usually aft of the line of aerodynamic centres. Once the wing is twisted, the effective incidence of the wing is increased, which causes a lift increment which then acts forward of the torsional axis, so that the effect is unstable.
The more the wings twist, the bigger this twisting moment becomes, which further increases the amount of twist. However, the tendency to twist is, of course, resisted by elastic forces due to the stiffness of the structure. This resistance to twist increases rapidly with the amount of twist, or strain, until it balances the aerodynamic twisting couple and equilibrium is reached.
However, as the speed increases, the aerodynamic forces increase rapidly, in proportion to airspeed, and therefore so also does the twisting moment. The elastic stiffness is not affected by speed, and so the amount of twist increases with speed. Eventually, a speed is reached at which the elastic resistance to twist is only just sufficient to counteract the twisting moment, and equilibrium is only achieved with the wing at breaking point. This speed is a critical speed called the wing torsional divergence speed, and any increase in speed above this value will result in structural failure-the wing will break off.
It is therefore essential to be able to predict this critical divergence speed, and to make the airframe strong and stiff enough to ensure that it is higher, by a substantial safety margin, than any speed which will ever be achieved in any condition in flight. Similar considerations apply to wing bending, and there is a critical wing flexural divergence speed which, similarly, must be made so high that it will not be reached in flight
The wing torsional divergence critical speed can be approximated by the following:
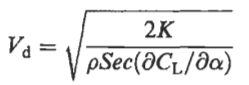
It is useful to see that parameters such as wing stiffness, K, increase the critical speed. The air density will have an inversely proportional relationship to the critical speed, which makes sense as the denser the air will be the greater the effect of twist on the wing in flight. The steeper the lift curve slope as well for the wing section will decrease the critical speed.
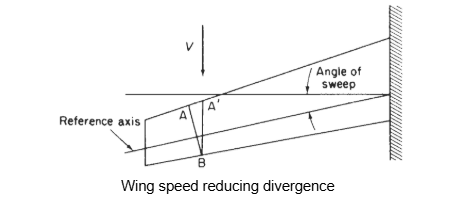
In order to reduce the effects of wing divergence, wings may be swept. Let us consider the swept wing shown below. The wing lift distribution causes the wing to bend in an upward direction. Points A and B on a line perpendicular to the reference axis will deflect by approximately the same amount, but this will be greater than the deflection of A’ which means that bending reduces the streamwise incidence of the wing. The corresponding negative increment of lift opposes the elastic twist, thereby reducing the possibility of wing divergence.
Flutter
During World War 1 the first case of aerodynamic flutter was recorded. The British Handley Page O/400 Bomber, shown below, experienced a self excited, vibratory oscillation on the tail plane during a flight, which subsequently caused the structure to fail.

Flutter was later classified as a ‘dynamic, oscillatory structural instability enabled by interactions between unsteady aerodynamic forces and moments created by vibratory motion of lifting surfaces and the vehicles to which these surfaces are attached.’ An investigation into the failure and cause of the failed tailplane resulted in the identification of an interaction between the fuselage twisting oscillation and the anti-symmetrical pitch rotations of the independently actuated elevators. This led to the design feature to be implemented whereby the elevators were connected to a common torque tube, thus eliminating the anti-symmetrical elevator motion/ This design feature became common design practice in aircraft.
Control surface flutter
Consider now an elevator which is hinged along a line which is well forward of the centre of gravity of the elevator, as in the case shown below. If the aircraft is in steady flight and a disturbance causes the tail and elevator to be displaced upwards then due to inertia, the elevator will tend to rotate about its hinge line in such a way that downward deflection results. This will cause the relative angle of attack of the elevator to increase and will produce more lift on the tail. As the fuselage is an elastic structure this extra force will cause it to bend and cause the tail to move further upwards. This will cause the elevator to deflect still further downwards, and so the process continues.
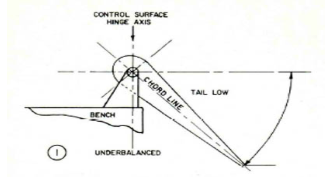
Resistance to this motion is, of course, provided by the elastic stiffness of the control circuit, which, if the stick is fixed, opposes the motion of the elevator. Similarly, the stiffness of the fuselage provides resistance to the tendency to bend. However, an oscillation may develop which, in certain circumstances is undamped, depending on the interaction of the inertia, aerodynamic and elastic effects described above. This oscillation is known as elevator flutter, and, if not checked, will ultimately cause structural failure.
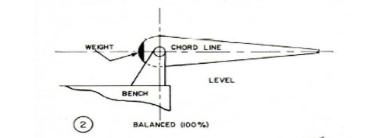
There is generally a simple remedy. Suppose that the distribution of the mass of the elevator could be altered, so that its centre of gravity lies on the hinge line (as shown below). Then the initial disturbance of the hinge line will not create any elevator deflection, and flutter will not occur.
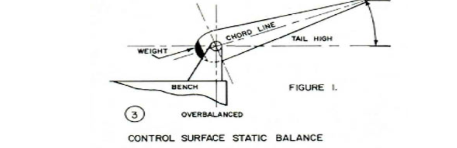
Further, if the centre of gravity of the elevator is forward of the hinge line, then upward movement of the hinge will cause the elevator to be deflected upwards, creating a downward increment in tail lift which, so far from creating the kind of instability which gives rise to flutter, acts as a damping factor and helps to eliminate the effects of the disturbance.
The careful arrangement of the mass distribution of the elevator, in order to eliminate the inertia-aeroelastic coupling which produces flutter, is called mass-balancing. It is not to be confused with aerodynamic balancing, to which it is totally unrelated. In the case of the simple kind of flutter just described, the object can be achieved by simply attaching a tongue to the nose of the control, and placing a mass on the end of it. This has the desired effect of moving the elevator centre of gravity forward. To eliminate the possibility of flutter even after a much more general kind of disturbance, more complete mass-balancing, involving the moments and products of inertia about the relevant axes, may be necessary.
The aileron may be caused to flutter in just the same way as the elevator, with the bending wing playing the role corresponding to that of the bending fuselage. An example of a more complicated motion which might occur would be a combination of wing torsional and flexural oscillations due to aileron inertia. Again, the remedy lies in mass balancing of the aileron.
Interested in our Aerospace Engineering Courses?
At iLearn Engineering®, we offer a diverse range of online accredited aerospace engineering courses and qualifications to cater to different academic and career goals. Our aerospace courses are available in varying credit values and levels, ranging from 40 credit Engineering Diplomas to a Bachelor’s equivalent 360 credit International Graduate Diploma.
All Aerospace Engineering Courses
All Aerospace Engineering Diploma Courses can be seen here.
Short Aerospace Courses (40 Credits)
- Diploma in Aerospace Engineering
- Diploma in Aircraft Design
- Diploma in Principles of Flight
- Diploma in Aerospace Structures
- Diploma in Aerodynamics
- Diploma in Aerodynamics, Propulsion and Space
First Year of Undergraduate (Level 4 – 120 Credits)
Higher International Certificate in Aerospace Engineering
Years One and Two of Undergraduate (Level 5 – 240 Credits)
Higher International Diploma in Aerospace Engineering
Degree Equivalent International Graduate Diploma (Level 6 – 360 Credits)
International Graduate Diploma in Aerospace Engineering
Complete Engineering Course Catalogue (all courses)
Alternatively, you can view all our online engineering courses here.
Recent Posts
Civil Engineering Courses and Diplomas: Topics, Skills and Career Routes
Civil Engineering Courses and Diplomas: Topics, Skills and Career Routes Introduction Civil engineering is the backbone of modern society. From roads and bridges to skyscrapers and water systems, civil engineers design, build, and maintain the infrastructure that keeps the world running. If you’re considering a civil engineering course or diploma, understanding what it covers is […]
What Is a Diploma in Engineering? Courses, Levels and Career Routes Explained
What Is a Diploma in Engineering? Courses, Levels and Career Routes Explained Introduction Engineering shapes the world around us, from the buildings we live in to the technology we use every day. But for many aspiring engineers, the biggest question is not whether to pursue engineering, but how to start. Traditional university degrees are not […]
Engineering Courses: How to Choose the Right Route for Your Career
Engineering Courses: How to Choose the Right Route for Your Career Introduction Choosing an engineering course can feel like standing at the beginning of several different roads, each leading towards a different kind of future. One route may lead into mechanical systems and manufacturing. Another may lead towards aircraft, infrastructure, electronics, computing, renewable energy or […]